Relying on ADAS framework for autonomous driving

Combining the best of testing and simulation
Drivers often experience malfunctioning ADAS systems in their vehicles. Adaptive cruise control (ACC) have shortcomings when the traffic conditions are too complex. Moreover, automated emergency braking (AEB) systems suffer from false detections or even activations, and lane keeping assist systems (LKAS) are not reliable in all conditions. This may lead to safety and comfort issues. How to prevent those issues as future cars include more and more those features making them progressively more autonomous?
Improving ADAS systems
Siemens engineers support OEM’s and suppliers to solve their tricky ADAS issues using Simcenter simulation software and testing portfolio. They are involved from the definition of suitable requirements and test cases, through to the verification and validation of the systems. For instance, it includes the implementation of advanced control algorithms, and the balance between safety and comfort. In addition, a tied collaboration with our customers contributes to solve existing issues and define better processes for the next vehicle development.
This accumulated experience led to the creation of an “ADAS framework”.
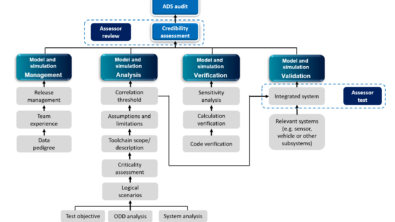
This framework allows the identification of issues early on, to analyze and solve them before it requires extensive prototype testing. Most importantly, using the framework, an evaluation of the full system can be done virtually, even when we are working on only a part of the system (eg sensors and perception, control algorithms etc).
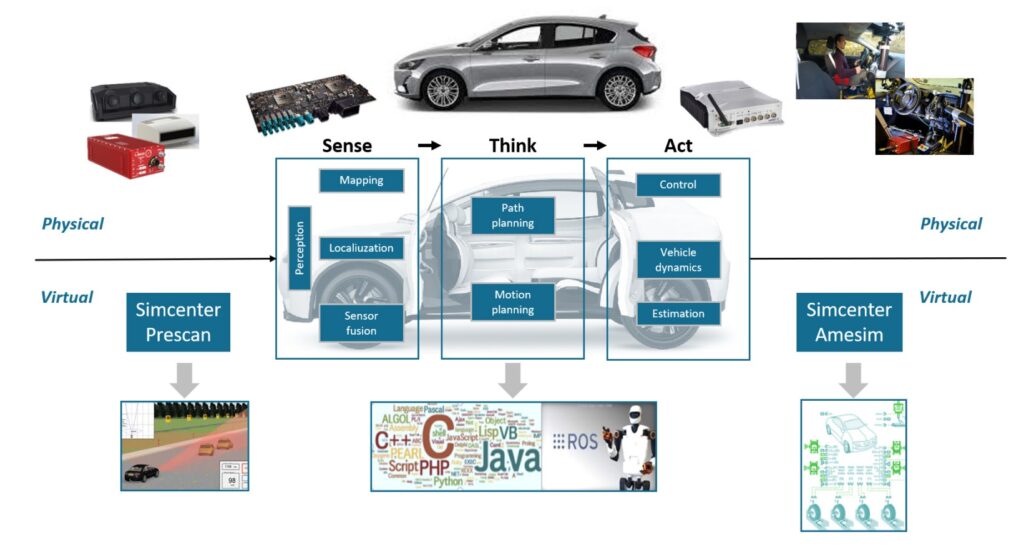
ADAS framework
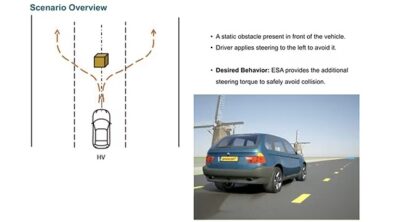
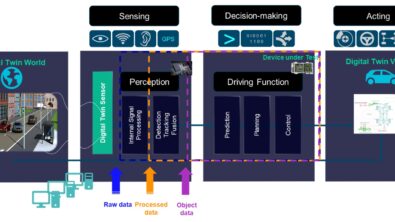
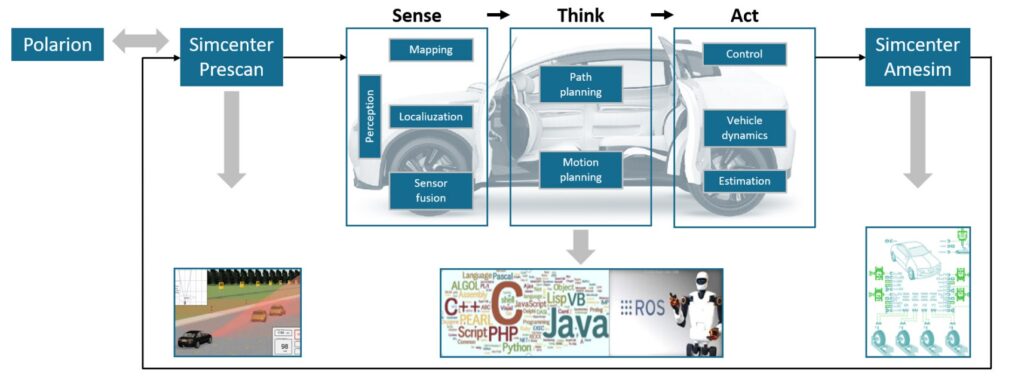
Generally virtual testing includes a model of the environment, sensors, and the scenarios definition. In many cases, engineers have to include the car dynamics via dedicated models. To enable early evaluation of the system, they add dedicated libraries of perception, path planning and control algorithms to evaluate the full system. In addition, engineers define relevant scenarios to assess the system in appropriate conditions. In the context of collaboration project, they customize the framework to the specific needs of the program, which includes methodology transfer.
When physical elements of the system, like the sensors, the physical electronic control unit (ECU), and eventually the auto itself, are available, a middleware allows to interface the models with the physical systems. This brings consistency between the virtual and physical testing. The virtual framework remains available as a Digital Twin. To enable vehicle-in-the-loop (ViL) testing, Siemens engineers can enhance the real physical environment with the introduction of virtual elements such as obstacles, other vehicles or vulnerable road users (VRU) . This all reduces the expensive proving ground testing required to fix or fine-tune the system.
Conclusion
To sum up, automotive vehicles include more and more advanced ADAS features which have a great potential to improve safety. However they also introduce a lot of challenges. Our development framework allows to verify ADAS performance early on. Additionnaly, it allows to identify perception, planning and control issues upfront using real-life scenarios. As soon as physical elements of the system are available, it evolves into a mixed-reality testing platform. Our experts work with car OEM’s and suppliers to adapt the framework to their needs and programs, and leverage our application know-how.
- Blog: Why is ADAS sensor data collection crucial to the development of self-driving cars?
- Webinar: Tackle the challenges of high-speed ADAS sensor and autonomous vehicle data collection for testing and validation