Safety Validation for Advanced Driver Assistance Systems (ADAS) and Automated Driving (AD) Systems

Safety Validation for ADAS and AD Systems
Ensuring the on-road safety of Advanced Driver Assistance Systems (ADAS) and automated driving systems is both crucial and complex. Standards such as ISO and UN-ECE [1,2,3] offer guidelines for evaluating and ensuring functional safety, but simply meeting these standards doesn’t guarantee safe operation on the road. Recently, there has been an uptick in crashes involving ADAS and autonomous vehicles (AVs), leading to more recalls [4]. This highlights the significant challenge companies face. It emphasizes the need for thorough testing and validation before these systems are deployed. For more insights into the development workflows of autonomous vehicles, check out this white paper [5]. Virtual testing via simulation is an upstream approach to verify and validate driver assistance and automated driving systems before on-road deployment. Moreover, simulation-based testing is a faster, safer and cost-effective method of ensuring safety and detecting issues prior to deployment.
Building Trust in Simulation Results
Simcenter Prescan, a leading simulation platform, offers physics-based sensor models that accurately model the real sensor behavior for unparalleled accuracy and detail. For deeper insights into Simcenter Prescan and it’s verification and validation methodology, explore our on-demand webinar [6]. The latest release of Simcenter Prescan features several new simulation assets offering a more rigorous match to the real world.

Enhanced ADAS/AV validation through Hardware-in-the-loop testing
Hardware-in-the-loop (HIL) testing is instrumental for testing of essential hardware elements, e.g., sensors, actuators, controllers, or complete autonomous driving systems. It provides a cost-effective way of validating hardware components of the driving system by relying on simulators to mimic the on-road driving scenarios, environment and time.
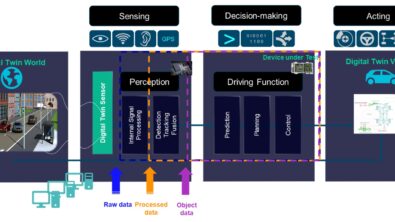
Hardware-in-the-loop (HiL) setups are commonly applied for testing the camera-based perception systems in Advanced Driver Assistance Systems (ADAS). This setup typically integrates the actual camera sensor into the testing environment. The test results are more realistic, as the ADA system is processing the real sensor data. Camera projection boxes, as well as camera injection setups, allow users to test the camera-based perception systems under challenging conditions.
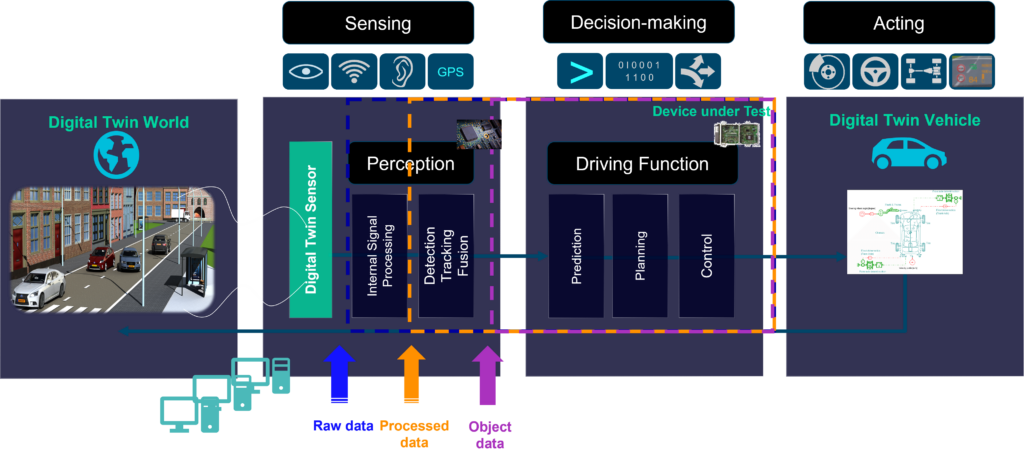
The challenge with a HiL test bench is to simulate sensors in real-time without compromising realism and fidelity. Simcenter solution meets this requirement. Through Simcenter Prescan and its Physics-Based Camera (PBC), users can simulate automotive cameras in authentic traffic scenarios, balancing quality and runtime efficiency. In the latest release of Simcenter Prescan, users now have the option to utilize advanced rendering techniques like DLSS (Deep Learning Super Sampling) and DLAA (Deep Learning Anti-Aliasing) to enhance visual quality without sacrificing runtime performance. By implementing these techniques in a projection camera HiL setup, users can validate ADAS systems under various weather, lighting, and traffic conditions in real-time.
Road editing made easy
Defining a road stretch via API without visual feedback has often proven to be error-prone. The traditional method lacked real-time visual cues, increasing the likelihood of mistakes. Users can now utilize the web-based scene editor to obtain instant visual feedback while they create or edit the road model. There are two ways to obtain visual feedback, depending on the parameters to be edited or created. The first way is in-place editing, where the scene is instantly updated on the viewer when the parameter values are edited. Few parameters, however, cannot be edited in place. The changes made to these parameters can be viewed by reloading the edited model.
What’s Next?
In a world rapidly progressing toward Level 4 autonomous vehicles, Siemens Digital Industries stands at the forefront, bridging the gap between virtual and real-world testing. Simcenter Prescan as part of the Simcenter Autonomy portfolio offers a seamless solution to transform drive data into scenario snippets ready for closed-loop testing and safety validation. We are currently working on a ground-breaking solution to discover and concretize the most hazardous and challenging scenarios. Our upcoming critical scenario creation [7] offering will empower you to proactively prepare your systems to navigate these situations safely on the road. Find out more about the features and capabilities of Simcenter Prescan on our website.
[1] ISO 26262 Road vehicles – Functional safety, second edition 2018.
[2] UN-ECE (United nations economic commission for Europe) The New Assessment/Test Method for automated driving (NATM), unece.org/sites/default/files/2022-04/ECE-TRANS-WP.29-2022-58.pdf, consulted in November 2023.
[3] UN-ECE guidelines and recommendations concerning safety requirements for automated driving systemsc WP.29-187-10e.pdf (unece.org), consulted in November 2023.
[4] Waymo recalls 444 self-driving vehicles over software error | Reuters
[5] Multi-pillar approach for safety validation of AVs, Siemens, January 2024, https://blogs.sw.siemens.com/simcenter/multi-pillar-approach-for-safety-validation-of-automated-vehicles/?spr_cid=120_15649&spr_apid=300000928894100
[6] Verification and validation of physics-based sensor simulation, Siemens, 2021, https://webinars.sw.siemens.com/en-US/validation-and-verification-of-sensors/