Improving Autonomous Valet Parking with simulation and testing

AVP system and algorithms.
Autonomous valet: the future of parking
Autonomous valet parking (AVP) systems in passenger cars will be among the first “driverless” vehicle applications that reach the market. AVP systems guide vehicles to safe and suitable parking spaces. All within a defined area, such as a parking garage, completely autonomously. All the driver needs to do is arrive at a ‘drop-off’ area, get out of the car, activate the system, and allow it to safely park the vehicle. When the driver is ready to retrieve their car, they call it from a smartphone app. Next it safely drives to the driver at a specified ‘pick-up’ location.
AVP systems are an important step on the road to fully autonomous vehicles. These systems can help reduce urban congestion through more efficient use of parking space. They also enhance the convenience and ease of finding parking in a crowded garage or street.
AVP systems must be very robust, ensuring the safety of the vehicle and any nearby pedestrians. Simultaneously dealing with complex traffic situations and variable conditions. Such as narrow parking spaces, obstacles, vehicle dynamics, weather and other disturbances. As a result, AVP development programs must include a rigorous testing and verification process. In order to manage this efficiently, we introduce:
- An accurate virtual framework to test and verify the system and algorithms, and identify a reduced set of critical scenarios for further physical verification
- A continuous link to functional, performance, and safety requirements
- Mixed-reality testing, combining the virtual framework and physical system or vehicle
First challenge: defining test scenarios
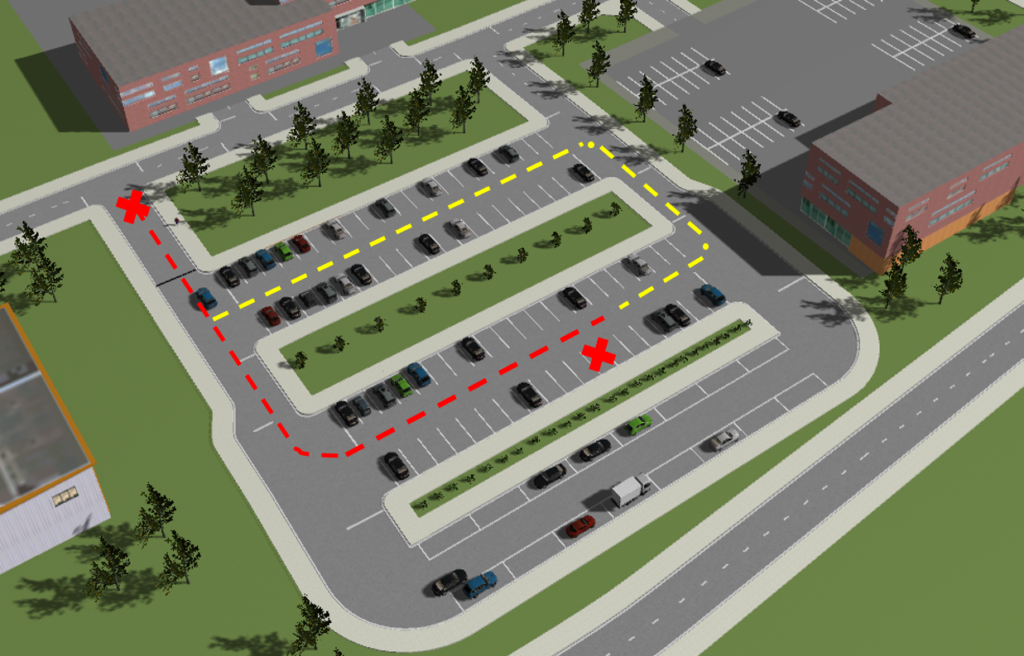
The definition of a complete set of test scenarios to validate the AVP system is one of the first challenges. Scenarios must include both nominal cases and failure cases. An example: failure of a sensor or noise on a sensor signal that impairs the system). For each scenario, a broad range of conditions and parameters are considered. For instance, when performing a parking maneuver these include the start and end positions of the subject vehicle, vehicle orientation and other actors such a pedestrians or other vehicles.
Many variants of these scenarios are defined. One scenario variant may have the vehicle backing out of a parking space as a pedestrian passes behind the vehicle. In this case, the vehicle would be expected to stop and wait for the pedestrian to pass.
The test case generation process is iterative and recursive: scenarios need to be modified throughout the development of the system. Using a virtual framework, these cases are tested for many combinations of parameters. Virtual testing enables the identification of the most critical combinations or instances of a given scenario in which the control strategy fails.
A virtual framework for AVP verification
Developers of AVP systems must verify that the system can deal with the very complex environments and conditions it will face in operation. This leads to a huge number of test conditions that cannot all be tested in the physical world. Virtual testing is instrumental in managing the verification of the system over a very large number of scenarios. This massive testing can be done on a cluster or in the cloud.
A robust virtual framework for verification and validation enables users to:
- Assess the set of sensors (type, number, location) needed for accurate identification of the driving scenario based on machine learning algorithms
- Check the behavior of the system in real-world driving conditions
- Test and verify the control strategy and algorithms
- Identify a manageable subset of critical scenarios for the physical verification and validation of the system
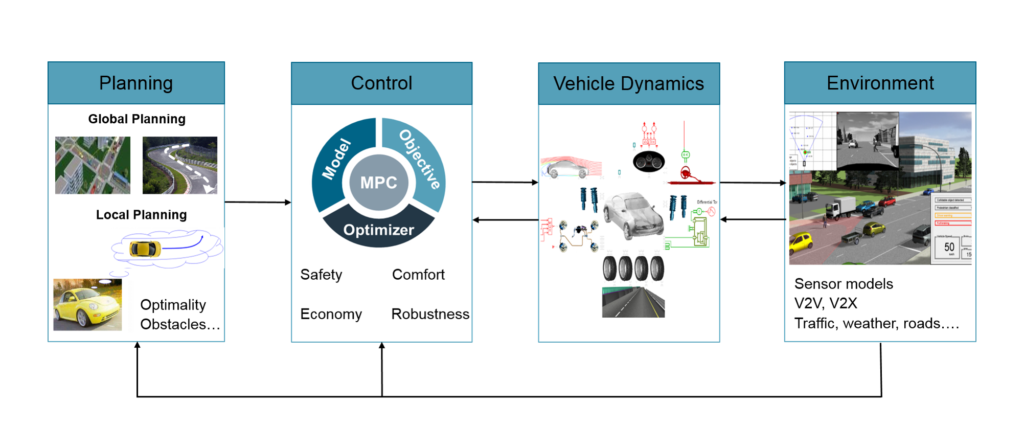
in a very large number of test conditions.
Leveraging such a virtual framework can reduce the cost and time required to fully verify and validate an AVP system. We do this by focusing physical testing on the most critical scenarios. You can also extend this framework to enable combined simulation and physical testing in a mixed-reality environment. This provides a greater flexibility in setting up all kinds of test scenarios. At the same time having the real system on the physical vehicle.
Conclusion
Progress on autonomous vehicles is continuous. As companies develop fully self-driving vehicles, AVP systems can provide a valuable stepping stone. They involve many of the same technologies and constraints in a more controlled environment. All the same, verification and validation of these systems must be thorough and robust. A virtual framework for this testing will be critical to achieving the necessary depth and breadth.
If you want to learn more about autonomous valet parking, you can download the whitepaper or you can see our free on demand webinar.