Ingenuity is Taking Off

Almost 2 weeks ago, NASA’s Mars rover Perseverance landed on Mars with its passenger Ingenuity. It was the 3rd spacecraft to arrive at Mars in February, after visits from UAE (“Hope”) and China (“Tianwen-1”, engl.: “Heavenly Question”). A total of 49 Mars missions have been conducted so far since 1960:
- 16 flybys
- 28 orbiters
- 18 landers
- 9 rovers
A few of the missions were focused on one of the two moons of Mars (Phobos) where 2 of the landers and 1 rover were supposed to head. There were also 4 penetrators planned in these missions.
The map shows the various other landing sites of NASA Mars missions. (Credit: NASA/JPL-Caltech)
Yes I know, you’re going to say “Hey Boris, you can’t count!” But the reason these numbers don’t add up to 49 missions is that there are multiple modules on many of them. Some might just consist of an orbiter, but others may contain an orbiter and a lander or even a penetrator or a rover as well.
Now, what is the difference between these?
- An orbiter simply orbits the planet (or moon) and sends back images and other data.
- A lander lands on the planet’s (or moon’s) surface but remains stationary and collects data to send back. A little like a Martian weather station 😉
- The penetrators are designed to crash into the planet’s (or moon’s) surface without surviving but reveal some of the soil beneath the surface for closer studies by rovers for example.
- Rovers are mobile units that move on the surface to study various things like soil samples, drill into rocks or monitor the atmosphere etc.
Also rovers have probes that function as weather stations as you can see from this post on the perseverance Mars Environmental Dynamics Analyzer (MEDA).
An interactive 3D model of the Perseverance rover. (Credit: NASA/JPL-Caltech)
Many of these systems have multiple sensors such as special cameras, temperature probes, wind speed probes or spectrometers to analyze the samples they collect. Unfortunately with all these missions to our closest neighbor, not all of them successfully arrived in one piece or even made it to the start of their mission. Some didn’t even leave the Low Earth Orbit (LEO) where their rockets placed them, others got destroyed during entry into Mars’ atmosphere. Yet mankind didn’t give up! That’s why I think the name chosen for the 49th mission to mars is perfect – Perseverance!
What you perhaps may not know and what makes this mission so special and unique is that this will conduct the very first “powered” flight on a different planet! This part of the mission is still to come in the next 1-2 months. The NASA Mars mission (Mars 2020) not only carries a rover, but it also carries a robotic helicopter named “Ingenuity”. It is not the first flight as there was a balloon used once on Venus but history repeats itself as the first flight on Earth was also a hot air balloon 😉
Ingenuity is alive
Or was it “Siemens – Ingenuity for life”? Strange coincidence but let’s roll with it 😉
Vaneeza Rupani, a 12th grader at Tuscaloosa County High School in Northport, Alabama, came up with the name for the helicopter. When she was asked why she thought “Ingenuity” would be a good name, she answered:
“Ingenuity would be a good name for the helicopter because that is exactly what it took to design this machine. The challenges faced trying to design something capable of flight on another planet can only be overcome with collaboration and creativity. It takes the ingenuity of an incredible group of people to create something with so many complex challenges.” Speaking of ingenuity, let’s talk about the simulation that you’ve all been patiently waiting for 😉
Simcenter FLOEFD – Ingenuity for flight
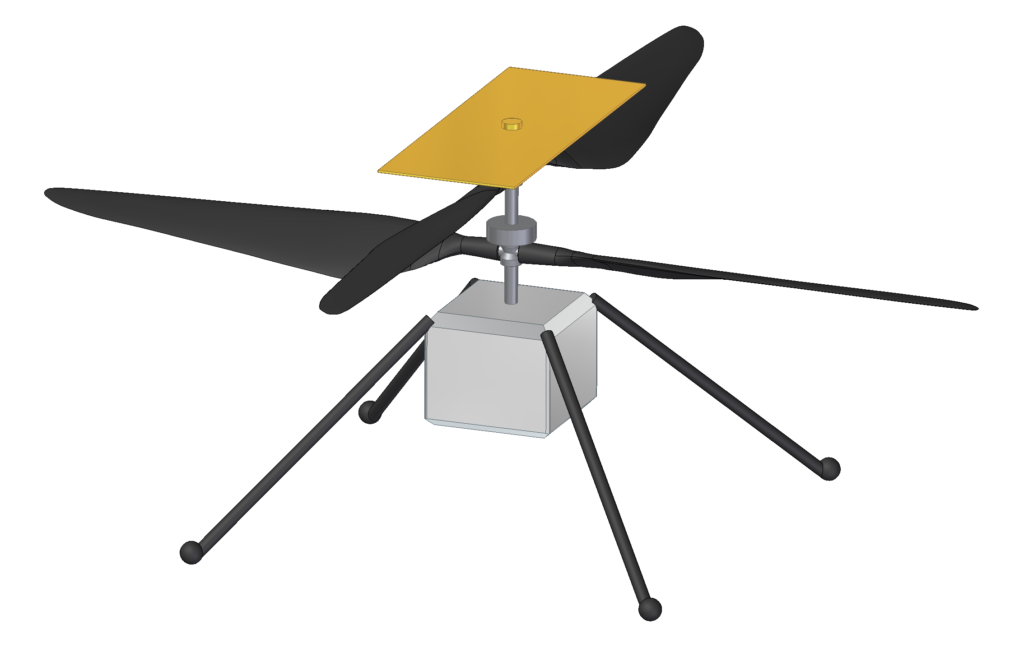
Finding a model for the simulation of the Ingenuity helicopter wasn’t that hard. NASA actually provides many of their models in a scaled size for 3D printing on their website.
An interactive 3D model of the Ingenuity helicopter. (Credit: NASA/JPL-Caltech)
As you might know, there are reverse engineering tools in Solid Edge and Siemens NX to get polygon or point cloud models from STL files back into NURBS-based CAD geometry and that’s what I did with the model I downloaded from the NASA website.
I have to admit, I had a little help as I’m not that familiar with the process of reverse engineering such models and Ben Weisenberger from the Solid Edge team did a brilliant job there. The key geometries for my simulation were the rotor blades. As they are swept-shaped geometries they can’t be easily created without the right airfoil shape to get roughly the same performance. Since I assumed the 3D model was derived from the original CAD model, the accuracy would be closer to the real thing than starting to design my own blade. Of course, this is just an assumption. In reality, they could look very different and therefore impact the performance. The rest of the helicopter consists of some blocks and cylinders to make out the shape of the model and it was easier to create them than to reverse engineer it.
With the model done, let’s look into the aerodynamics simulation of the helicopter in flight.
Up, up and away…
But before we start, what’s the weather like on Mars?
There have been missions to Mars with a range of sensors to measure the atmosphere during their entry and landing phase as well as measurements during the usual day and night cycles. With Mars being only about 10% the mass of Earth, its gravity is of course also much lower and just around 0.38g (3.72 m/s²), so 38% of Earth’s gravity. This is important for us as the lift we need to generate is much lower.
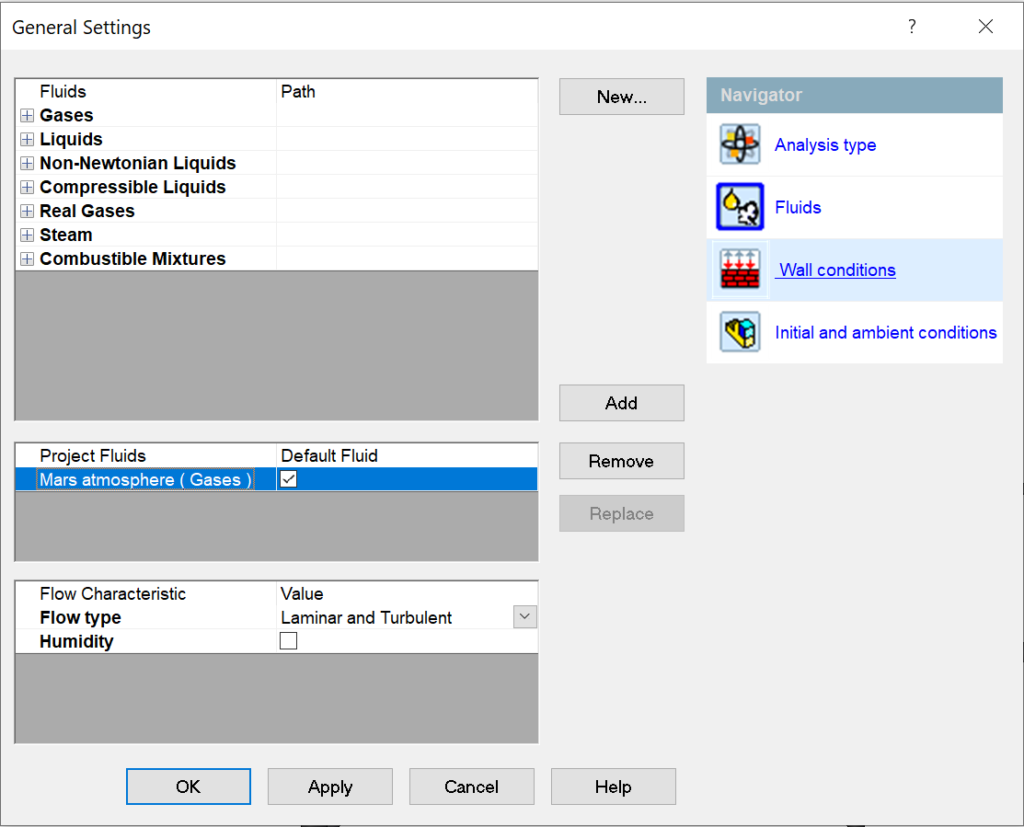
But this has also an impact on the atmosphere of Mars. Not only consists the general atmosphere of our worst nightmare with around 95% being CO2, 1.9% Argon, 1.9% Nitrogen and only 0.15% Oxygen. So really not a human friendly atmosphere. It also has only a pressure of just around 700 Pa during an average day around noon and a planetary average surface temperature of -63°C – basically a cold, toxic and thin air for humans. But luckily for our explorers, the surface temperature in the region the previous Mars missions were conducted, can reach mild temperatures above freezing during the day time which is important to our equipment.
Since there is no International Standard Atmosphere (ISA) defined for Mars, I took the liberty to define the Martian Siemens Standard Atmosphere (MSSA) with a pressure of 700 Pa and 5°C at Martian sea level (once we find some sea level) 😉
Looking at the specs of Ingenuity, it weighs 1.8 kg, and the rotor RPM is 2400. Just to give you some idea of the size of Ingenuity, the propeller diameter is 1.2 m (4 ft) and the height is 0.49 m (1 ft 7 in). Of course, Ingenuity will not be able to fly very high and far and it is flying autonomously as the distance to earth would be too big for direct control. With communication times ranging from around 3 to 22 minutes between Earth and Mars (one way), any maneuvering could not be done safely. That’ll be like driving through town with a friend and telling him/her to stop 3 minutes after you’ve passed the stop sign, but your friend reacts to your command after another 3 minutes 😉 So with the atmospheric data and the RPM of the rotor blade, we can set up the simulation and there is even a “Mars atmosphere” as a fluid with the right gas mixture for the correct fluid properties in Simcenter FLOEFD.
But would Ingenuity be able to fly on earth as well?
Well, let’s simply clone the project and adjust the MAAS to ISA atmospheric parameters and run the simulation again. That’s a change done in less than 60 seconds. Let’s have a look at the results and how Ingenuity would perform on Mars and Earth.
Mars vs. Earth, who will win?
Well looking at the Goals I have defined for the Lift and Torque on the top and bottom rotors of the co-axial configuration, we can see that of course the loads are much higher on Earth than on Mars and that’s due to the denser atmosphere. Extracting these results from multiple projects based on their goals but also plots can be easily done with the Compare feature in Simcenter FLOEFD.
| Goals | Mars | Earth |
|---|---|---|
| Force (Z) upper propeller [N] | 3.6 | 364.1 |
| Torque (Z) upper propeller [Nm] | -0.4 | -33.9 |
| Force (Z) lower propeller [N] | 3.3 | 317.8 |
| Torque (Z) lower propeller [Nm] | 0.4 | 34.4 |
Propeller force and torque comparison table between flying on Mars and Earth.
The sign of the torque is different between top and bottom rotor due to the counter rotation to negate the effects a single rotor would have, otherwise the body of the helicopter would rotate and the whole flight dynamics would be a mess. It would look more like the crashing helicopters in the movies once the tail rotor is damaged and they spiral down to the ground. And we don’t want that to happen on our first flight on Mars, do we? 😉
The forces are measured in Newton here and to see if there is enough lift for Ingenuity to lift off, we need to convert its mass also in Newton. Taking the gravity we would get a weight of 6.696 N on Mars and 17.658 N on Earth.
We can see clearly that on Mars we have a combined lift of both rotors of 6.869 N, so in the current rotor pitch position we are slightly above the weight of Ingenuity and it would slightly rise off the ground.
On Earth however, we would shoot up from the ground like a rocket on steroids with a combined lift of around 683 N, which is 38 times higher than Ingenuity’s weight. Of course either the RPM or the size and design of the rotors would have to be adjusted for the earth atmosphere. Not to mention that the motors used in Ingenuity would not be able to perform on earth considering the torque they are designed to provide in the thinner Mars atmosphere. Also the flight time is limited to around 90 seconds per flight and the elevation limit is 5m and it could therefore travel around 50m from the starting point and back.
So Ingenuity would have an RPM limited by the torque the motors can provide and with that, the RPM is probably not high enough to lift off and therefore only make a lot of noise, almost like a fly on its back buzzing with its wings.
So if you would want to do a race on Mars and Earth, Earth would lose with exactly the same specs for Ingenuity if not done in a Mars climate chamber as shown in a video from Veritasium. But I also want to share some nice animations in which you can see Ingenuity on Mars with the graphs showing the torque and forces for the top and bottom rotor as well as on Earth. This was simulated in transient with the sliding mesh approach. You can clearly see the effects of the blades passing each other and the impact on each other with their flow on the forces and torque of the rotors. The videos show the results for Mars’ and Earth’s atmosphere.
Also an animations of the flow field developing and the wake of the blades with the blade tip vortices.
The model was done in Solid Edge and simulated in Simcenter FLOEFD for Solid Edge, a fully Solid Edge embedded CFD simulation for designers, but such simulations can be conducted with any of the Simcenter CFD solutions.
If you liked what Siemens can do for Martian explorers, check out this video on the Curiosity rover (also a fitting name).
Comments
Comments are closed.