What’s new in Simcenter Prescan 2307

Expanding coverage of challenging scenarios
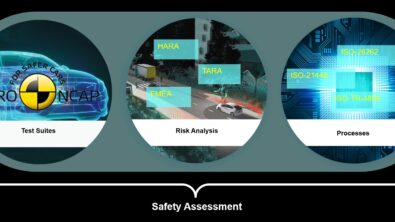
With the 2307 release, Simcenter™ Prescan™ software helps you efficiently develop and test autonomy algorithms by simulating challenging scenarios. This is accomplished through enhanced sensor simulation realism, faster creation of scenarios through support of OpenScenario 2 standard, easy access to pre-built New Car Assessment Program (NCAP) scenarios, and improved simulation performance that provides the possibility to simulate more than 1000 actors in a single experiment.
Create ambient light during night conditions
According to the United States department of transportation, seventy six percent of pedestrian fatalities occur at night. In Japan, a National Police Agency study showed that sixty percent of pedestrian and cyclist fatalities occurred during the twilight hours. For autonomous vehicle systems, night conditions pose a real challenge. In 2022, the Insurance Institute for Highway Safety in the United States introduced a nighttime test of pedestrian automatic emergency braking systems to address the high percentage of pedestrian crashes that occur on dark roads. To address nighttime testing and development challenges for the automotive industry,
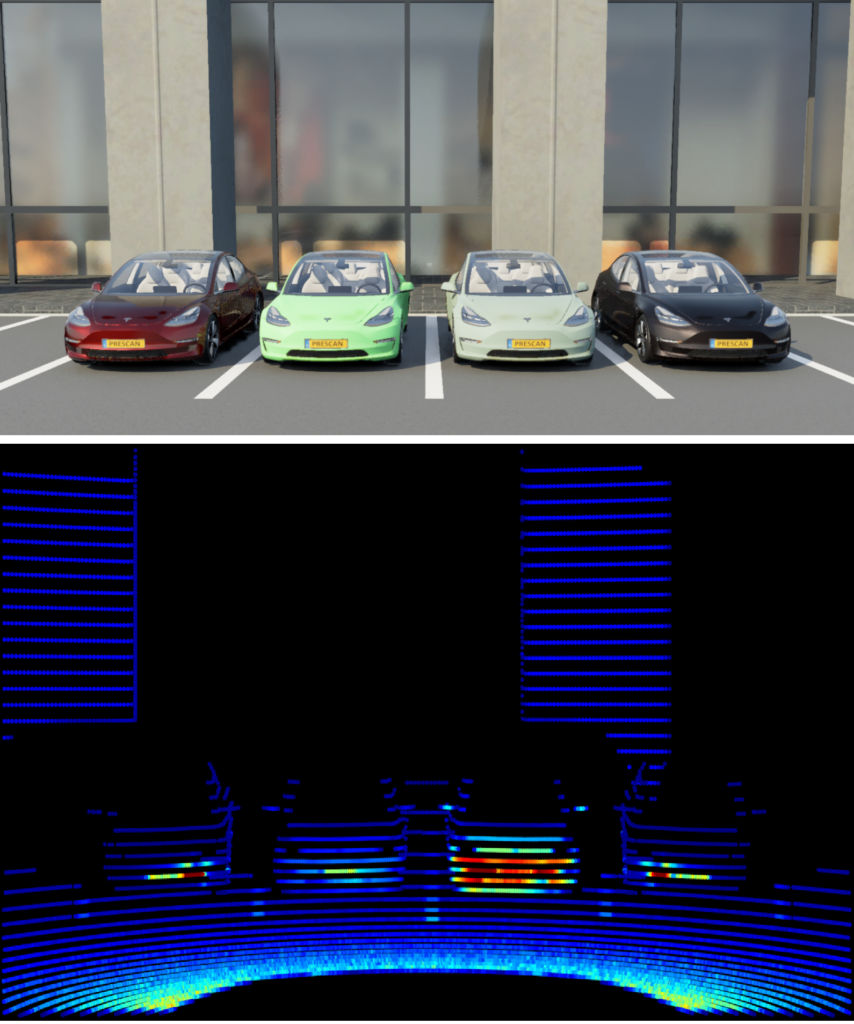
Simcenter Prescan’s physics-based camera now allows easy creation and configuration of nighttime scenarios via the graphical user interface and the data model API, with a set of lighting presets according to the Bortle scale. This setting affects both the brightness of the background and the environment lighting in the scene, allowing for the creation of realistic night conditions.
Add user-defined materials to database
Sensors play a crucial role in autonomous driving. They allow the vehicle to see and sense its surroundings. For a camera, a lidar, or a radar, sensing is dependent on the way the electromagnetic waves interact with different materials.
Simcenter Prescan’s material database can now be extended with user import materials. In this way users can both test and develop their sensors against imported as well as already available materials from Simcenter Prescan’s material database. In addition, with advancements in pigment production and coating innovations, chemical producers will be able to test quickly how their coatings may respond to different sensors in a virtual environment.
Filter setting before analog-to-digital conversion to improve radar detection
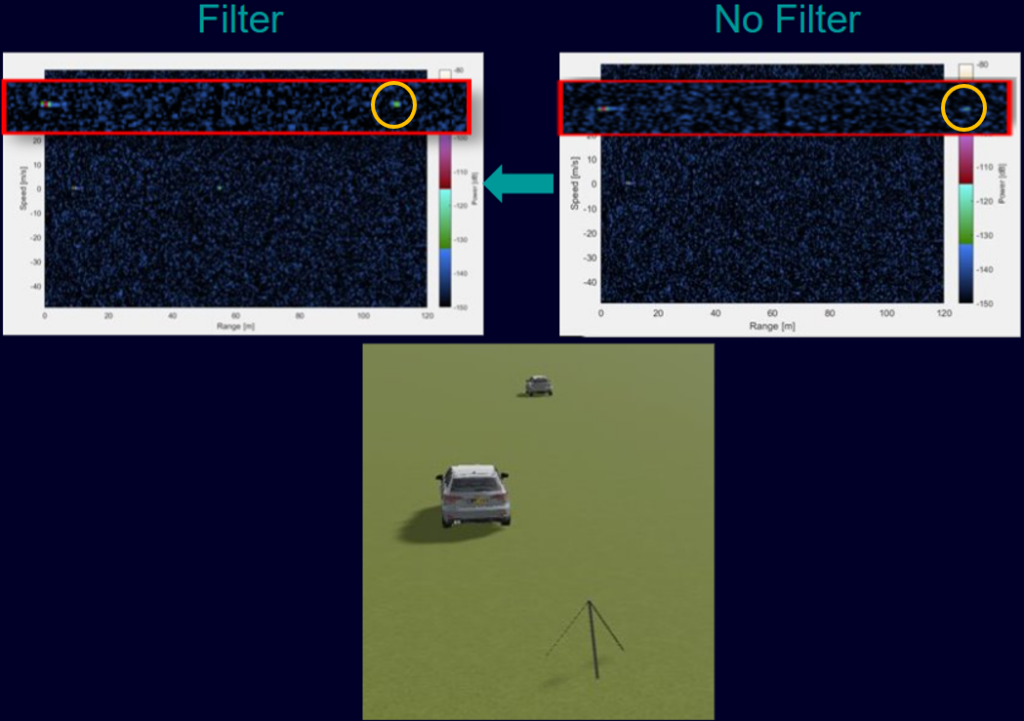
For automotive radars, the power return from targets decreases with distance to the power of four. Consequently, the received signal can be below the noise threshold or sidelobes of the targets which are in front of the radar. Therefore, detection may be lost.
Using the Simcenter Prescan physics-based radar, you may now apply a filter on the analog side before the analog-to-digital-converter. This improves radar detection for close as well as large distances.
The image here shows the range doppler plot for two cars in front of the radar. Note the change in the signal from the distant car after the application of the filter.

Improve coupling with traffic simulators
By employing co-simulation with traffic simulators, you can effectively assess algorithms under diverse simulated traffic conditions, thereby enhancing the functionality of the developed functions. To support this, Simcenter Prescan is constantly improving its coupling with traffic simulators such as Aimsun, Vissim and SUMO.
Simcenter Prescan, together with Vissim, allows you to use a wide range of traffic actors to simulate traffic. This release extends adds ‘Bus’ as a new category for traffic actors.
Additionally, users may now simulate more than >1000 traffic actors in their driving experiments using the power of Simcenter Prescan and SUMO co-simulation, which allows verification of autonomous systems in increasingly challenging urban environments.
Introducing the support for Open Scenario 2
Open Scenario 2.0 is the latest standard from the Association for Standardization of Automation and Measuring Systems (ASAM) to describe dynamic content of a traffic scene, which is envisioned to be the super set of its predecessor Open Scenario 1.x. The standard presents a scalable and inter-tool compatible format to specify scenarios in a human-readable language.
Simcenter Prescan begins supporting Open Scenario 2.0 format from this release, making it one of the few simulators in the market with this capability. You can now import an OSC 2.0 using the Prescan Data Model API.
Since the standard is in an introductory phase, Simcenter Prescan only supports a limited set of OSC 2.0 constructs to enable you to define basic scenarios. We will incrementally expand coverage of the standard over future releases as the standard matures.
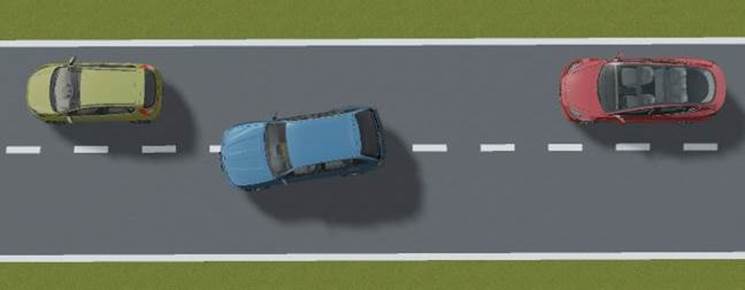
Use included Euro NCAP test scenarios in Open Scenario format
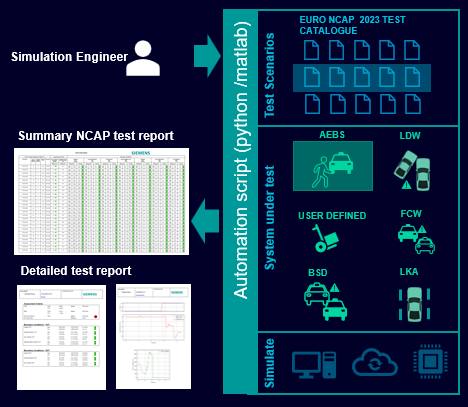
Building a high-quality scenario catalogue for NCAP safety assessment requires enormous engineering effort. As part of this release, we are publishing the latest NCAP 2023 scenario catalogue in Open Scenario format to test five Advanced Driving Assistance Systems.
By including these test scenarios earlier in the development cycle, OEM’s can ensure highest safety rating for their systems. Together with the scenario catalogue, Simcenter Prescan provides a set of sample ADAS control models and a toolchain that automates the necessary steps for system testing. The automation scripts and sample controller are available for use via Matlab and C++ interfaces of Simcenter Prescan. The toolchain allows you to generate test results in a format similar to NCAP assessment; customize the vehicle model and integrate your own control system in the simulation model. Moreover, the toolchain can be used for Simulation-in-the-Loop and Hardware-in-the-Loop workflows.
Validate for General Safety Regulations with dynamic road signs
The European Parliament has enacted the General Safety Regulation (GSR), which is aimed at improving the overall safety of road vehicles in the European Union (EU). The regulation introduces a range of mandatory advanced driver assistant systems to improve road safety applicable to all new road vehicles.
Siemens is increasing the capabilities in Simcenter Prescan to support ADAS function verification and validation, and one of the features we have developed is the “dynamic” behavior of our road signs. It is now possible to make use of the traffic signs in the verification and validation of intelligent speed assist systems.
Check out this demo on Support Center on how to use the traffic signs in the experiment.
Boost algorithm development efficiency with continuous test piplelines
Functional issues and software bugs when caught towards the end of development process cause delays in launches and demand expensive remedies. The “shift left” paradigm for engineering enabled by the Simcenter portfolio allows teams to frontload testing and mitigate risks earlier in the process.
This release of Simcenter Prescan360 introduces a set of functions for routine cloud-based integration and verification of software functions, to boost the productivity and velocity of the team. In this iterative development process, the function developer commits the latest code changes to repository. This automatically triggers the GitLab pipeline for automated integration and verification tests in the cloud. The functional regression and progression of their code changes are reported back to the developers in pre-defined metrics. The developer then iterates the function and commits the new version back to the repository. The cycle continues till the function achieves the desired level of quality and performance.
Whats Next?
We are leading the way to level 4 autonomous vehicle and un-manned aerial vehicle development by expediting and facilitating the progress of AV development through our upcoming critical scenario creation offering. We are working to enable users to easily and efficiently discover and create unknown-unsafe scenarios.